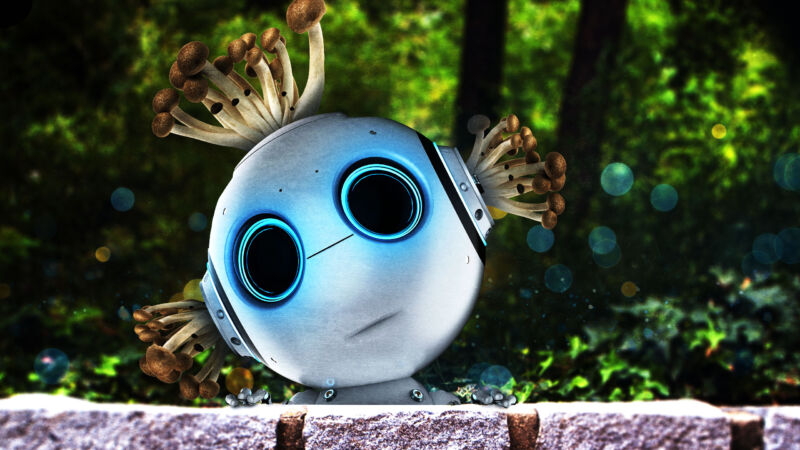
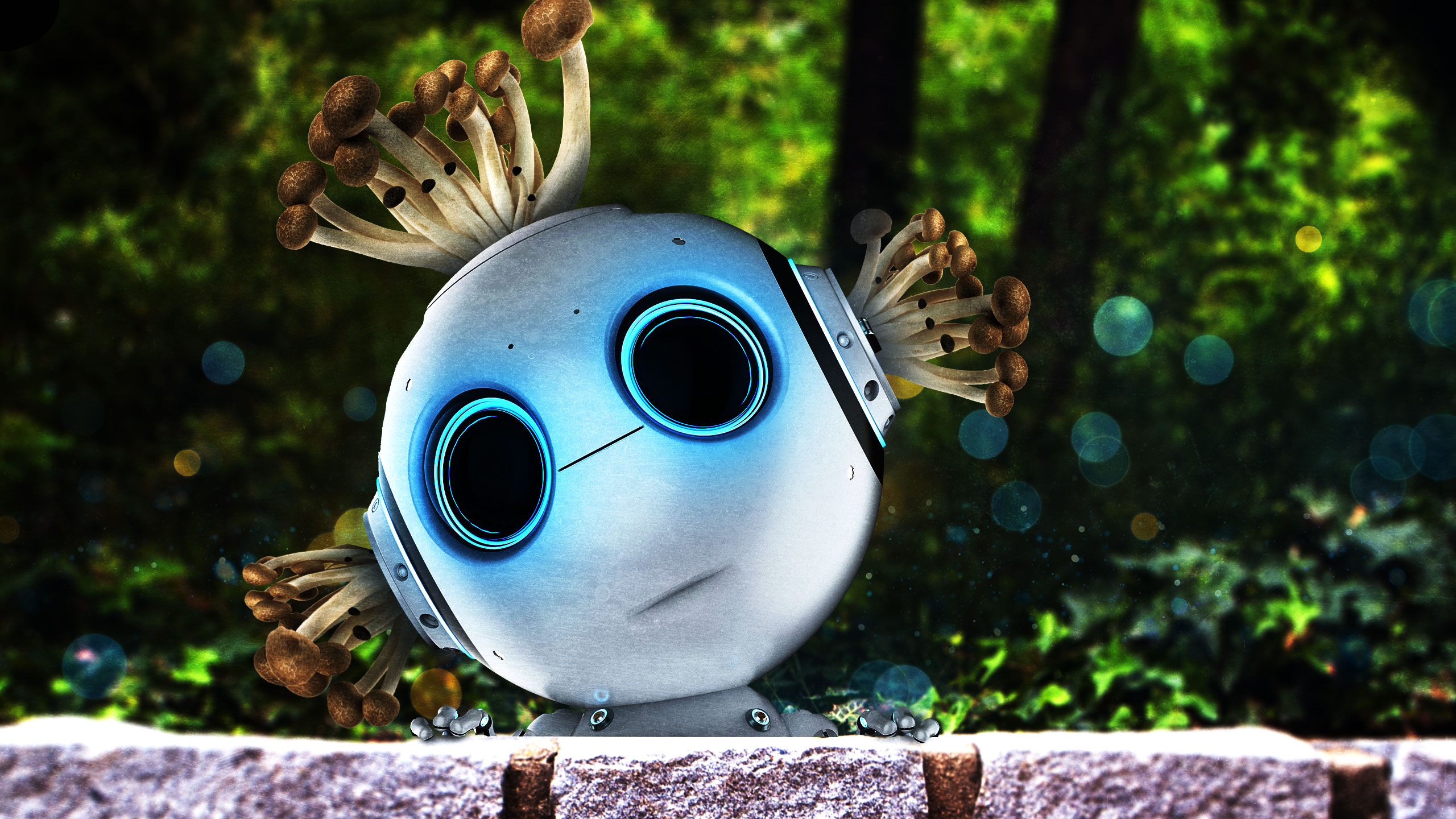
Most living organisms easily surpass machines when it comes to navigating real-world environments and adaptability to changing conditions. One way to bridge that gap is building biohybrid robots that merge synthetic machinery with biological components like animal muscles, bacteria, or plants.
But living muscles are very hard to keep alive in a machine, bacteria have a very short lifespan, and plants tend to react to things a bit slowly, like Ents in The Lord of the Rings. So, a team of scientists at Cornell University went down a different path and built biohybrid robots controlled by fungi, specifically, oyster mushrooms.
Understanding mushrooms’ signals
Robots controlled by fungi, despite giving strong Last of Us vibes, are a good idea on paper. Fungi are very easy to sustain and can live pretty much everywhere, including extreme environments like the Arctic, or even amid nuclear contamination. They're also cheap to culture in large quantities and excel at reacting to environmental cues like exposure to light.
There’s ample opportunity in the form of a mobile billboard. Kiwibot is so convinced of this fact that it plunked down $25 million to purchase Nickelytics.
Four decades after the first IEEE International Conference on Robotics and Automation (ICRA) in Atlanta, robotics is bigger than ever. Next week in Rotterdam is the IEEE ICRA@40 conference, “a celebration of 40 years of pioneering research and technological advancements in robotics and automation.” There’s an ICRA every year, of course. Arguably the largest robotics research conference in the world, the 2024 edition was held in Yokohama, Japan back in May.
ICRA@40 is not just a second ICRA conference in 2024. Next week’s conference is a single track that promises “a journey through the evolution of robotics and automation,” through four days of short keynotes from prominent roboticists from across the entire field. You can see for yourself, the speaker list is nuts. There are also debates and panels tackling big ideas, like: “What progress has been made in different areas of robotics and automation over the past decades, and what key challenges remain?” Personally, I’d say “lots” and “most of them,” but that’s probably why I’m not going to be up on stage.
Forty years ago is a long time, but it’s not that long, so just for fun, I had a look at the proceedings of ICRA 1984 which are available on IEEE Xplore, if you’re curious. Here’s an excerpt of the forward from the organizers, which included folks from International Business Machines and Bell Labs:
The proceedings of the first IEEE Computer Society International Conference on Robotics contains papers covering practically all aspects of robotics. The response to our call for papers has been overwhelming, and the number of papers submitted by authors outside the United States indicates the strong international interest in robotics. The Conference program includes papers on: computer vision; touch and other local sensing; manipulator kinematics, dynamics, control and simulation; robot programming languages, operating systems, representation, planning, man-machine interfaces; multiple and mobile robot systems. The technical level of the Conference is high with papers being presented by leading researchers in robotics. We believe that this conference, the first of a series to be sponsored by the IEEE, will provide a forum for the dissemination of fundamental research results in this fast developing field.
Technically, this was “ICR,” not “ICRA,” and it was put on by the IEEE Computer Society’s Technical Committee on Robotics, since there was no IEEE Robotics and Automation Society at that time; RAS didn’t get off the ground until 1987.
1984 ICR(A) had two tracks, and featured about 75 papers presented over three days. Looking through the proceedings, you’ll find lots of familiar names: Harry Asada, Ruzena Bajcsy, Ken Salisbury, Paolo Dario, Matt Mason, Toshio Fukuda, Ron Fearing, and Marc Raibert. Many of these folks will be at ICRA@40, so if you see them, make sure and thank them for helping to start it all, because 40 years of robotics is definitely something to celebrate.
Abu Dhabi-based Khalifa University of Science and Technology in the United Arab Emirates (UAE) will be hosting the 36th edition of the IEEE/RSJ International Conference on Intelligent Robots and Systems
(IROS 2024) to highlight the Middle East and North Africa (MENA) region’s rapidly advancing capabilities in the robotics and intelligent transport systems.
Themed “Robotics for Sustainable Development,” the IROS 2024 will be held from 14-18 October 2024 at the Abu Dhabi National Exhibition Center (ADNEC) in the UAE’s capital city. It will offer a platform for universities and research institutions to display their research and innovation activities and initiatives in robotics, gathering researchers, academics, leading corporate majors, and industry professionals from around the globe.
A total of 13 forums, nine global-level
competitions and challenges covering various aspects of robotics and AI, an IROS Expo, as well as an exclusive Career Fair will also be part of IROS 2024. The challenges and competitions will focus on physical or athletic intelligence of robots, remote robot navigation, robot manipulation, underwater robotics, as well as perception and sensing.
Delegates for the event will represent sectors including manufacturing, healthcare, logistics, agriculture, defense, security, and mining sectors with 60 percent of the talent pool having over six years of experience in robotics. A major component of the conference will be the poster sessions, keynotes, panel discussions by researchers and scientists, and networking events.
Khalifa University will be hosting IROS 2024 to highlight the Middle East and North Africa (MENA) region’s rapidly advancing capabilities in the robotics and intelligent transport systems.Khalifa University
Abu Dhabi ranks first on the world’s safest cities list in 2024, according to online database Numbeo, out of 329 global cities in the 2024 standings, holding the title for eight consecutive years since 2017, reflecting the emirate’s ongoing efforts to ensure a good quality of life for citizens and residents.
With a multicultural community, Abu Dhabi is home to people from more than 200 nationalities and draws a large number of tourists to some of the top art galleries in the city such as Louvre Abu Dhabi and the Guggenheim Abu Dhabi, as well as other destinations such as Ferrari World Abu Dhabi and Warner Bros. World Abu Dhabi.
The UAE and Abu Dhabi have increasingly become a center for creative skillsets, human capital and advanced technologies, attracting several international and regional events such as the global COP28 UAE climate summit, in which more than 160 countries participated.
Abu Dhabi city itself has hosted a number of association conventions such as the 34th International Nursing Research Congress and is set to host the UNCTAD World Investment Forum, the 13th World Trade Organization (WTO) Ministerial Conference (MC13), the 12th World Environment Education Congress in 2024, and the IUCN World Conservation Congress in 2025.
Khalifa University’s Center for Robotics and Autonomous Systems (KU-CARS) includes a vibrant multidisciplinary environment for conducting robotics and autonomous vehicle-related research and innovation.Khalifa University
Dr. Jorge Dias, IROS 2024 General Chair, said: “Khalifa University is delighted to bring the Intelligent Robots and Systems 2024 to Abu Dhabi in the UAE and highlight the innovations in line with the theme Robotics for Sustainable Development. As the region’s rapidly advancing capabilities in robotics and intelligent transport systems gain momentum, this event serves as a platform to incubate ideas, exchange knowledge, foster collaboration, and showcase our research and innovation activities. By hosting IROS 2024, Khalifa University aims to reaffirm the UAE’s status as a global innovation hub and destination for all industry stakeholders to collaborate on cutting-edge research and explore opportunities for growth within the UAE’s innovation ecosystem.”
“This event serves as a platform to incubate ideas, exchange knowledge, foster collaboration, and showcase our research and innovation activities” —Dr. Jorge Dias, IROS 2024 General Chair
Dr. Dias added: “The organizing committee of IROS 2024 has received over 4000 submissions representing 60 countries, with China leading with 1,029 papers, followed by the U.S. (777), Germany (302), and Japan (253), as well as the U.K. and South Korea (173 each). The UAE with a total of 68 papers comes atop the Arab region.”
Driving innovation at Khalifa University is the Center for Robotics and Autonomous Systems (KU-CARS) with around 50 researchers and state-of-the-art laboratory facilities, including a vibrant multidisciplinary environment for conducting robotics and autonomous vehicle-related research and innovation.
IROS 2024 is sponsored by IEEE Robotics and Automation Society, Abu Dhabi Convention and Exhibition Bureau, the Robotics Society of Japan (RSJ), the Society of Instrument and Control Engineers (SICE), the New Technology Foundation, and the IEEE Industrial Electronics Society (IES).
Video Friday is your weekly selection of awesome robotics videos, collected by your friends at IEEE Spectrum robotics. We also post a weekly calendar of upcoming robotics events for the next few months. Please send us your events for inclusion.
ICRA@40: 23–26 September 2024, ROTTERDAM, NETHERLANDS
Researchers at the Max Planck Institute for Intelligent Systems and ETH Zurich have developed a robotic leg with artificial muscles. Inspired by living creatures, it jumps across different terrains in an agile and energy-efficient manner.
ETH Zurich researchers have now developed a fast robotic printing process for earth-based materials that does not require cement. In what is known as “impact printing,” a robot shoots material from above, gradually building a wall. On impact, the parts bond together, and very minimal additives are required.
Using doors is a longstanding challenge in robotics and is of significant practical interest in giving robots greater access to human-centric spaces. The task is challenging due to the need for online adaptation to varying door properties and precise control in manipulating the door panel and navigating through the confined doorway. To address this, we propose a learning-based controller for a legged manipulator to open and traverse through doors.
By patterning liquid metal paste onto a soft sheet of silicone or acrylic foam tape, we developed stretchable versions of conventional rigid circuits (like Arduinos). Our soft circuits can be stretched to over 300% strain (over 4x their length) and are integrated into active soft robots.
NASA’s Curiosity rover is exploring a scientifically exciting area on Mars, but communicating with the mission team on Earth has recently been a challenge due to both the current season and the surrounding terrain. In this Mars Report, Curiosity engineer Reidar Larsen takes you inside the uplink room where the team talks to the rover.
Very often, people ask us what Reachy 2 is capable of, which is why we’re showing you the manipulation possibilities (through teleoperation) of our technology. The robot shown in this video is the Beta version of Reachy 2, our new robot coming very soon!
The Scalable Autonomous Robots (ScalAR) Lab is an interdisciplinary lab focused on fundamental research problems in robotics that lie at the intersection of robotics, nonlinear dynamical systems theory, and uncertainty.
Astorino is a 6-axis educational robot created for practical and affordable teaching of robotics in schools and beyond. It has been created with 3D printing, so it allows for experimentation and the possible addition of parts. With its design and programming, it replicates the actions of #KawasakiRobotics industrial robots, giving students the necessary skills for future work.
Watch the second episode of the ExoMars Rosalind Franklin rover mission—Europe’s ambitious exploration journey to search for past and present signs of life on Mars. The rover will dig, collect, and investigate the chemical composition of material collected by a drill. Rosalind Franklin will be the first rover to reach a depth of up to two meters below the surface, acquiring samples that have been protected from surface radiation and extreme temperatures.
Here’s a cool tool you can use to help you find inspiration and enjoyment: The Schoolyard Podcast is a new show from School Specialty and teacher Nancy Chung. Twice each month, host Chung, also known as @FancyNancyin5th on Instagram and TikTok, will be joined by industry experts, fellow educators, and subject matter experts from School Specialty to dive into educational trends, seasonally relevant topics, and emerging and proven solutions to create an entertaining and educational listening experience.
Chung is a fun-loving 5th-grade teacher, former robotics coach, and content creator from Orange County, California, in her 26th year of teaching. She is passionate about sharing her ideas on creative projects, designing intentional learning spaces, teaching highly engaging lessons, building meaningful relationships, and cultivating a community that sparks discovery and inclusion.
Each episode will begin with a thought-provoking introduction by Chung, followed by a conversation between Chung and the episode’s guest. In the final segment, launching in episode 5 and dubbed “Tag, You’re It!,” Chung and the featured guest will answer a question submitted by a listener by tagging @SchoolSpecialty with #schoolyardtagyoureit and their question on Facebook, Instagram, Pinterest, or Twitter. Listeners who have their question answered on the air will receive a free Schoolyard Podcast t-shirt.
The first five episodes explore:
“How to Make Space for Wellness and Social-emotional Learning” with Sue Ann Highland, PhD, national education strategist with School Specialty;
“Esports is Like a Magnet!” with Claire LaBeaux from the Network of Academic and Scholastic Esports Federations (NASEF);
“Extended Learning for Every Student” with Nicole Hill, a former educator, principal, and current subject matter expert with School Specialty;
“Setting the tone for Back to School” with Instagram influencers Stephanie Osmundson and Loreal Hemenway, collectively known as @happilyeverelementary; and
“Surprising Benefits of Robotics in Schools & Where to Start” with Naomi Hartl, science and STEM subject matter expert with School Specialty.
The first five episodes are available now on Apple Music, Spotify, Amazon Music, Samsung Podcasts, Podcast Index, and Listen Notes.Learn more.
A new study examined how humans perceive different types of deception by robots, revealing that people accept some lies more than others. Researchers presented nearly 500 participants with scenarios where robots engaged in external, hidden, and superficial deceptions in medical, cleaning, and retail settings. Participants disapproved most of hidden deceptions, such as a cleaning robot secretly filming, while external lies, like sparing a patient from emotional pain, were viewed more favorably.
Video Friday is your weekly selection of awesome robotics videos, collected by your friends at IEEE Spectrum robotics. We also post a weekly calendar of upcoming robotics events for the next few months. Please send us your events for inclusion.
ICRA@40: 23–26 September 2024, ROTTERDAM, NETHERLANDS
The National Science Foundation Human AugmentatioN via Dexterity Engineering Research Center (HAND ERC) was announced in August 2024. Funded for up to 10 years and $52 million, the HAND ERC is led by Northwestern University, with core members Texas A&M, Florida A&M, Carnegie Mellon, and MIT, and support from Wisconsin-Madison, Syracuse, and an innovation ecosystem consisting of companies, national labs, and civic and advocacy organizations. HAND will develop versatile, easy-to-use dexterous robot end effectors (hands).
The Environmental Robotics Lab at ETH Zurich, in partnership with Wilderness International (and some help from DJI and Audi), is using drones to sample DNA from the tops of trees in the Peruvian rainforest. Somehow, the treetops are where 60 to 90 percent of biodiversity is found, and these drones can help researchers determine what the heck is going on up there.
1X introduces NEO Beta, “the pre-production build of our home humanoid.”
“Our priority is safety,” said Bernt Børnich, CEO at 1X. “Safety is the cornerstone that allows us to confidently introduce NEO Beta into homes, where it will gather essential feedback and demonstrate its capabilities in real-world settings. This year, we are deploying a limited number of NEO units in selected homes for research and development purposes. Doing so means we are taking another step toward achieving our mission.”
We love MangDang’s fun and affordable approach to robotics with Mini Pupper. The next generation of the little legged robot has just launched on Kickstarter, featuring new and updated robots that make it easy to explore embodied AI.
The Kickstarter is already fully funded after just a day or two, but there are still plenty of robots up for grabs.
Carcinization is a concept in evolutionary biology where a crustacean that isn’t a crab eventually becomes a crab. So why not do the same thing with robots? Crab robots solve all problems!
The Robotics Department of the University of Michigan created an interactive community art project. The group that led the creation believed that while roboticists typically take on critical and impactful problems in transportation, medicine, mobility, logistics, and manufacturing, there are many opportunities to find play and amusement. The final piece is a grid of art boxes, produced by different members of our robotics community, which offer an eight-inch-square view into their own work with robotics.
I’m sure most actuators go through some form of life-cycle testing. But if you really want to test an electric motor, put it into a BattleBot and see what happens.
In this video, we present collaboration aerial grasping and transportation using multiple quadrotors with cable-suspended payloads. Grasping using a suspended gripper requires accurate tracking of the electromagnet to ensure a successful grasp while switching between different slack and taut modes. In this work, we grasp the payload using a hybrid control approach that switches between a quadrotor position control and a payload position control based on cable slackness. Finally, we use two quadrotors with suspended electromagnet systems to collaboratively grasp and pick up a larger payload for transportation.
While the RoboCup was held over a month ago, we still wanted to make a small summary of our results, the most memorable moments, and of course an homage to everyone who is involved with the B-Human team: the team members, the sponsors, and the fans at home. Thank you so much for making B-Human the team it is!
Video Friday is your weekly selection of awesome robotics videos, collected by your friends at IEEE Spectrum robotics. We also post a weekly calendar of upcoming robotics events for the next few months. Please send us your events for inclusion.
ICRA@40: 23–26 September 2024, ROTTERDAM, NETHERLANDS
Over the past few months, Unitree G1 robot has been upgraded into a mass production version, with stronger performance, ultimate appearance, and being more in line with mass production requirements.
This robot is from Kinisi Robotics, which was founded by Brennand Pierce, who also founded Bear Robotics. You can’t really tell from this video, but check out the website because the reach this robot has is bonkers.
Kinisi Robotics is on a mission to democratize access to advanced robotics with our latest innovation—a low-cost, dual-arm robot designed for warehouses, factories, and supermarkets. What sets our robot apart is its integration of LLM technology, enabling it to learn from demonstrations and perform complex tasks with minimal setup. Leveraging Brennand’s extensive experience in scaling robotic solutions, we’re able to produce this robot for under $20k, making it a game-changer in the industry.
Researchers in the Department of Mechanical Engineering at Carnegie Mellon University have created the first legged robot of its size to run, turn, push loads, and climb miniature stairs.
They say it can “run,” but I’m skeptical that there’s a flight phase unless someone sneezes nearby.
Kento Kawaharazuka from JSK Robotics Laboratory at the University of Tokyo wrote in to share this paper, just accepted at RA-L, which (among other things) shows a robot using its flexible hands to identify objects through random finger motion.
[ Paper accepted by IEEE Robotics and Automation Letters ]
Thanks Kento!
It’s one thing to make robots that are reliable, and it’s another to make robots that are reliable and repairable by the end user. I don’t think iRobot gets enough credit for this.
Boardwalk Robotics is announcing its entry into the increasingly crowded commercial humanoid(ish) space with Alex, a “workforce transformation” humanoid upper torso designed to work in manufacturing, logistics, and maintenance.
Before we get into Alex, let me take just a minute here to straighten out how Boardwalk Robotics is related to IHMC, the Institute for Human Machine Cognition in Pensacola, Fla. IHMC is, I think it’s fair to say, somewhat legendary when it comes to bipedal robotics—its DARPA Robotics Challenge team took second place in the final event (using a Boston Dynamics DRC Atlas), and when NASA needed someone to teach the agency’s Valkyrie humanoid to walk better, they sent it to IHMC.
Boardwalk, which was founded in 2017, has been a commercial partner with IHMC when it comes to the actual building of robots. The most visible example of this to date has been IHMC’s Nadia humanoid, a research platform which Boardwalk collaborated on and built.There’s obviously a lot of crossover between IHMC and Boardwalk in terms of institutional knowledge and experience, but Alex is a commercial robot developed entirely in-house by Boardwalk.
“We’ve used Nadia to learn a lot in the realm of dynamic locomotion research, and we’re taking all that and sticking it into a manipulation platform that’s ready for commercial work,” says Brandon Shrewsbury, Boardwalk Robotics’ CTO. “With Alex, we’re focusing on the manipulation side first, getting that well established. And then picking the mobility to match the task.”
The first thing you’ll notice about Alex is that it doesn’t have legs, at least for now. Boardwalk’s theory is that for a humanoid to be practical and cost effective in the near term, legs aren’t necessary, and that there are many tasks that offer a good return on investment where a stationary pedestal or a glorified autonomous mobile robotic base would be totally fine.
“There are going to be some problem sets that require legs, but there are many problem sets that don’t,” says Robert Griffin, a technical advisor at Boardwalk. “And there aren’t very many problem sets that don’t require halfway decent manipulation capabilities. So if we can design the manipulation well from the beginning, then we won’t have to depend on legs for making a robot that’s functionally useful.”
It certainly helps that Boardwalk isn’t at all worried about developing legs: “Every time we bring up a new humanoid, it’s something like twice as fast as the previous time,” Griffin says. This will be the eighth humanoid that IHMC has been involved in bringing up—I’d tell you more about all eight of those humanoids, but some of them are so secret that even I don’t know anything about them.Legs are definitely on the road map, but they’re not done yet, and IHMC will have a hand in their development to speed things along: It turns out that already having access to a functional (top of the line, really) locomotion stack is a big head start.
Alex’s actuators are all designed in-house, and the next version will feature new grippers that allow for quicker tool changes.Boardwalk Robotics
While the humanoid space is wide open right now and competition isn’t really an issue, looking ahead, Boardwalk sees safety as one of its primary differentiators since it’s not starting out with legs, says Shrewsbury. “For a full humanoid, there’s no way to make that completely safe. If it falls, it’s going to face-plant.” By keeping Alex on a stable base, it can work closer to humans and potentially move its arms much faster while also preserving a dynamic safety zone.
Alex is available for researchers to purchase immediately.Boardwalk Robotics
Despite its upbringing in research, Alex is not intended to be a research robot. You can buy it for research purposes, if you want, but Boardwalk will be selling Alex as a commercial robot. At the moment, Boardwalk is conducting pilot programs with Alexwhere they’re working in partnership with select customers, with the eventual goal of transitioning to a service model. The first few sectors that Boardwalk is targeting include logistics (because, of course) and food processing, although as Boardwalk CEO Michael Morin tells us, one of the very first pilots is (appropriately enough) in aviation.
Morin, who helped to commercialize Barrett Technologies’ WAM Arm before spending some time at Vicarious Surgical as that company went public, joined Boardwalk to help them turn good engineering into a good product, which is arguably the hardest part of making useful robots (besides all the other hardest parts). “A lot of these companies are just learning about humanoids for the first time,” says Morin. “That makes the customer journey longer. But we’re putting in the effort to educate them on how this could be implemented in their world.”
If you want an Alex of your very own, Boardwalk is currently selecting commercial partners for a few more pilots. And for researchers, the robot is available right now.
Video Friday is your weekly selection of awesome robotics videos, collected by your friends at IEEE Spectrum robotics. We also post a weekly calendar of upcoming robotics events for the next few months. Please send us your events for inclusion.
ICRA@40: 23–26 September 2024, ROTTERDAM, NETHERLANDS
In this 3 minutes long one-take video, the LimX Dynamics CL-1 takes on the challenge of continuous heavy objects loading among shelves in a simulated warehouse, showcasing the advantages of the general-purpose form factor of humanoid robots.
Birds, bats and many insects can tuck their wings against their bodies when at rest and deploy them to power flight. Whereas birds and bats use well-developed pectoral and wing muscles, how insects control their wing deployment and retraction remains unclear because this varies among insect species. Here we demonstrate that rhinoceros beetles can effortlessly deploy their hindwings without necessitating muscular activity. We validated the hypothesis using a flapping microrobot that passively deployed its wings for stable, controlled flight and retracted them neatly upon landing, demonstrating a simple, yet effective, approach to the design of insect-like flying micromachines.
Agility Robotics’ CTO, Pras Velagapudi, talks about data collection, and specifically about the different kinds we collect from our real-world robot deployments and generally what that data is used for.
ABB Robotics and the Texas Children’s Hospital have developed a groundbreaking lab automation solution using ABB’s YuMi® cobot to transfer fruit flies (Drosophila melanogaster) used in the study for developing new drugs for neurological conditions such as Alzheimer’s, Huntington’s and Parkinson’s.
Extend Robotics are building embodied AI enabling highly flexible automation for real-world physical tasks. The system features intuitive immersive interface enabling tele-operation, supervision and training AI models.
Video Friday is your weekly selection of awesome robotics videos, collected by your friends at IEEE Spectrum robotics. We also post a weekly calendar of upcoming robotics events for the next few months. Please send us your events for inclusion.
ICRA@40: 23–26 September 2024, ROTTERDAM, NETHERLANDS
At ICRA 2024, in Tokyo last May, we sat down with the director of Shadow Robot, Rich Walker, to talk about the journey toward developing its newest model. Designed for reinforcement learning, the hand is extremely rugged, has three fingers that act like thumbs, and has fingertips that are highly sensitive to touch.
Food Angel is a food delivery robot to help with the problems of food insecurity and homelessness. Utilizing autonomous wheeled robots for this application may seem to be a good approach, especially with a number of successful commercial robotic delivery services. However, besides technical considerations such as range, payload, operation time, autonomy, etc., there are a number of important aspects that still need to be investigated, such as how the general public and the receiving end may feel about using robots for such applications, or human-robot interaction issues such as how to communicate the intent of the robot to the homeless.
The UKRI FLF team RoboHike of UCL Computer Science of the Robot Perception and Learning lab with Forestry England demonstrate the ANYmal robot to help preserve the cultural heritage of an historic mine in the Forest of Dean, Gloucestershire, UK.
This clip is from a reboot of the British TV show “Time Team.” If you’re not already a fan of “Time Team,” let me just say that it is one of the greatest retro reality TV shows ever made, where actual archaeologists wander around the United Kingdom and dig stuff up. If they can find anything. Which they often can’t. And also it has Tony Robinson (from “Blackadder”), who runs everywhere for some reason. Go to Time Team Classics on YouTube for 70+ archived episodes.
UBTECH humanoid robot Walker S Lite is working in Zeekr’s intelligent factory to complete handling tasks at the loading workstation for 21 consecutive days, and assist its employees with logistics work.
Current visual navigation systems often treat the environment as static, lacking the ability to adaptively interact with obstacles. This limitation leads to navigation failure when encountering unavoidable obstructions. In response, we introduce IN-Sight, a novel approach to self-supervised path planning, enabling more effective navigation strategies through interaction with obstacles.
MIT MechE researchers introduce an approach called SimPLE (Simulation to Pick Localize and placE), a method of precise kitting, or pick and place, in which a robot learns to pick, regrasp, and place objects using the object’s computer-aided design (CAD) model, and all without any prior experience or encounters with the specific objects.
Staff, students (and quadruped robots!) from UCL Computer Science wish the Great Britain athletes the best of luck this summer in the Olympic Games & Paralympics.
Walking in tall grass can be hard for robots, because they can’t see the ground that they’re actually stepping on. Here’s a technique to solve that, published in Robotics and Automation Letters last year.
There is no such thing as excess batter on a corn dog, and there is also no such thing as a defective donut. And apparently, making Kool-Aid drink pouches is harder than it looks.
Today, Figure is introducing the newest, slimmest, shiniest, and least creatively named next generation of its humanoid robot: Figure 02. According to the press release, Figure 02 is the result of “a ground-up hardware and software redesign” and is “the highest performing humanoid robot,” which may even be true for some arbitrary value of “performing.” Also notable is that Figure has been actively testing robots with BMW at a manufacturing plant in Spartanburg, S.C., where the new humanoid has been performing “data collection and use case training.”
The rest of the press release is pretty much, “Hey, check out our new robot!” And you’ll get all of the content in the release by watching the videos. What you won’t get from the videos is any additional info about the robot. But we sent along some questions to Figure about these videos, and have a few answers from Michael Rose, director of controls, and Vadim Chernyak, director of hardware.
First, the trailer:
How many parts does Figure 02 have, and is this all of them?
Figure: A couple hundred unique parts and a couple thousand parts total. No, this is not all of them.
Does Figure 02 make little Figure logos with every step?
Figure: If the surface is soft enough, yes.
Swappable legs! Was that hard to do, or easier to do because you only have to make one leg? Figure: We chose to make swappable legs to help with manufacturing.
Is the battery pack swappable too?
Figure: Our battery is swappable, but it is not a quick swap procedure.
What’s that squishy-looking stuff on the back of Figure 02’s knees and in its elbow joints?
Figure: These are soft stops which limit the range of motion in a controlled way and prevent robot pinch points
Where’d you hide that thumb motor?
Figure: The thumb is now fully contained in the hand.
Tell me about the “skin” on the neck!
Figure: The skin is a soft fabric which is able to keep a clean seamless look even as the robot moves its head.
And here’s the reveal video:
When Figure 02’s head turns, its body turns too, and its arms move. Is that necessary, or aesthetic?
Figure: Aesthetic.
The upper torso and shoulders seem very narrow compared to other humanoids. Why is that?
Figure: We find it essential to package the robot to be of similar proportions to a human. This allows us to complete our target use cases and fit into our environment more easily.
What can you tell me about Figure 02’s walking gait?
Figure: The robot is using a model predictive controller to determine footstep locations and forces required to maintain balance and follow the desired robot trajectory.
How much runtime do you get from 2.25 kilowatt-hours doing the kinds of tasks that we see in the video?
Figure: We are targeting a 5-hour run time for our product.
Slick, but also a little sinister?Figure
This thing looks slick. I’d say that it’s maybe a little too far on the sinister side for a robot intended to work around humans, but the industrial design is badass and the packaging is excellent, with the vast majority of the wiring now integrated within the robot’s skins and flexible materials covering joints that are typically left bare. Figure, if you remember, raised a US $675 million Series B that valued the company at $2.6 billion, and somehow the look of this robot seems appropriate to that.
I do still have some questions about Figure 02, such as where the interesting foot design came from and whether a 16-degree-of-freedom hand is really worth it in the near term. It’s also worth mentioning that Figure seems to have a fair number of Figure 02 robots running around—at least five units at its California headquarters, plus potentially a couple of more at the BMW Spartanburg manufacturing facility.
I also want to highlight this boilerplate at the end of the release: “our humanoid is designed to perform human-like tasks within the workforce and in the home.” We are very, very far away from a humanoid robot in the home, but I appreciate that it’s still an explicit goal that Figure is trying to achieve. Because I want one.
Here are some of the things I’ve learned about robotics after working in the field for almost five decades. In honor of Isaac Asimov and Arthur C. Clarke, my two boyhood go-to science fiction writers, I’m calling them my three laws of robotics.
The visual appearance of a robot makes a promise about what it can do and how smart it is. It needs to deliver or slightly overdeliver on that promise or it will not be accepted.
When robots and people coexist in the same spaces, the robots must not take away from people’s agency, particularly when the robots are failing, as inevitably they will at times.
Technologies for robots need 10+ years of steady improvement beyond lab demos of the target tasks to mature to low cost and to have their limitations characterized well enough that they can deliver 99.9 percent of the time. Every 10 more years gets another 9 in reliability.
Note that these laws are written from the point of view of making robots work in the real world, where people pay for them, and where people want return on their investment. This is very different from demonstrating robots or robot technologies in the laboratory.
In the lab there is phalanx of graduate students eager to demonstrate their latest idea, on which they have worked very hard, to show its plausibility. Their interest is in showing that a technique or technology that they have developed is plausible and promising. They will do everything in their power to nurse the robot through the demonstration to make that point, and they will eagerly explain everything about what they have developed and what could come next.
In the real world there is just the customer, or the employee or relative of the customer. The robot has to work with no external intervention from the people who designed and built it. It needs to be a good experience for the people around it or there will not be more sales to those, and perhaps other, customers.
So these laws are not about what might, or could, be done. They are about real robots deployed in the real world. The laws are not about research demonstrations. They are about robots in everyday life.
The Promise Given By Appearance
My various companies have produced all sorts of robots and sold them at scale. A lot of thought goes into the visual appearance of the robot when it is designed, as that tells the buyer or user what to expect from it.
The iRobot Roomba was carefully designed to meld looks with function.iStock
The Roomba, from iRobot, looks like a flat disk. It cleans floors. The disk shape was so that it could turn in place without hitting anything it wasn’t already hitting. The low profile of the disk was so that it could get under the toe kicks in kitchens and clean the floor that is overhung just a little by kitchen cabinets. It does not look like it can go up and down stairs or even a single step up or step down in a house and it cannot. It has a handle, which makes it look like it can be picked up by a person, and it can be. Unlike fictional Rosey the Robot it does not look like it could clean windows, and it cannot. It cleans floors, and that is it.
The Packbot, the remotely operable military robot, also from iRobot, looked very different indeed. It has tracked wheels, like a miniature tank, and that appearance promises anyone who looks at it that it can go over rough terrain, and is not going to be stopped by steps or rocks or drops in terrain. When the Fukushima disaster happened, in 2011, Packbots were able to operate in the reactor buildings that had been smashed and wrecked by the tsunami, open door handles under remote control, drive up rubble-covered staircases and get their cameras pointed at analog pressure and temperature gauges so that workers trying to safely secure the nuclear plant had some data about what was happening in highly radioactive areas of the plant.
An iRobot PackBot picks up a demonstration object at the Joint Robotics Repair Detachment at Victory Base Complex in Baghdad.Alamy
The point of this first law of robotics is to warn against making a robot appear more than it actually is. Perhaps that will get funding for your company, leading investors to believe that in time the robot will be able to do all the things its physical appearance suggests it might be able to do. But it is going to disappoint customers when it cannot do the sorts of things that something with that physical appearance looks like it can do. Glamming up a robot risks overpromising what the robot as a product can actually do. That risks disappointing customers. And disappointed customers are not going to be advocates for your product/robot, nor be repeat buyers.
Preserving People’s Agency
The worst thing for its acceptance by people that a robot can do in the workplace is to make their jobs or lives harder, by not letting them do what they need to do.
Robots that work in hospitals taking dirty sheets or dishes from a patient floor to where they are to be cleaned are meant to make the lives of the nurses easier. But often they do exactly the opposite. If the robots are not aware of what is happening and do not get out of the way when there is an emergency they will probably end up blocking some lifesaving work by the nurses—e.g., pushing a gurney with a critically ill patient on it to where they need to be for immediate treatment. That does not endear such a robot to the hospital staff. It has interfered with their main job function, a function of which the staff is proud, and what motivates them to do such work.
A lesser, but still unacceptable behavior of robots in hospitals, is to have them wait in front of elevator doors, central, and blocking for people. It makes it harder for people to do some things they need to do all the time in that environment—enter and exit elevators.
Those of us who live in San Francisco or Austin, Texas, have had firsthand views of robots annoying people daily for the last few years. The robots in question have been autonomous vehicles, driving around the city with no human occupant. I see these robots every single time I leave my house, whether on foot or by car.
Some of the vehicles were notorious for blocking intersections, and there was absolutely nothing that other drivers, pedestrians, or police could do. We just had to wait until some remote operator hidden deep inside the company that deployed them decided to pay attention to the stuck vehicle and get it out of people’s way. Worse, they would wander into the scene of a fire where there were fire trucks and firefighters and actual buildings on fire, get confused and just stop, sometime on top of the fire hoses.
There was no way for the firefighters to move the vehicles, nor communicate with them. This is in contrast to an automobile driven by a human driver. Firefighters can use their normal social interactions to communicate with a driver, and use their privileged position in society as frontline responders to apply social pressure on a human driver to cooperate with them. Not so with the autonomous vehicles.
The autonomous vehicles took agency from people going about their regular business on the streets, but worse took away agency from firefighters whose role is to protect other humans. Deployed robots that do not respect people and what they need to do will not get respect from people and the robots will end up undeployed.
Robust Robots That Work Every Time
Making robots that work reliably in the real world is hard. In fact, making anything that works physically in the real world, and is reliable, is very hard.
For a customer to be happy with a robot it must appear to work every time it tries a task, otherwise it will frustrate the user to the point that they will question whether it makes their life better or not.
But what does appear mean here? It means that the user can have the assumption that it going to work, as their default understanding of what will happen in the world.
The tricky part is that robots interact with the real physical world.
Software programs interact with a well-understood abstracted machine, so they tend not fail in a manner where the instructions in them do not get executed in a consistent way by the hardware on which they are running. Those same programs may also interact with the physical world, be it a human being, a network connection, or an input device like a mouse. It is then that the programs might fail as the instructions in them are based on assumptions in the real world that are not met.
Robots are subject to forces in the real world, subject to the exact position of objects relative to them, and subject to interacting with humans who are very variable in their behavior. There are no teams of graduate students or junior engineers eager to make the robot succeed on the 8,354th attempt to do the same thing that has worked so many times before. Getting software that adequately adapts to the uncertain changes in the world in that particular instance and that particular instant of time is where the real challenge arises in robotics.
Great-looking videos are just not the same things as working for a customer every time. Most of what we see in the news about robots is lab demonstrations. There is no data on how general the solution is, nor how many takes it took to get the video that is shown. Even worse sometimes the videos are tele-operated or sped up many times over.
I have rarely seen a new technology that is less than ten years out from a lab demo make it into a deployed robot. It takes time to see how well the method works, and to characterize it well enough that it is unlikely to fail in a deployed robot that is working by itself in the real world. Even then there will be failures, and it takes many more years of shaking out the problem areas and building it into the robot product in a defensive way so that the failure does not happen again.
Most robots require kill buttons or estops on them so that a human can shut them down. If a customer ever feels the need to hit that button, then the people who have built and sold the robot have failed. They have not made it operate well enough that the robot never gets into a state where things are going that wrong.
Video Friday is your weekly selection of awesome robotics videos, collected by your friends at IEEE Spectrum robotics. We also post a weekly calendar of upcoming robotics events for the next few months. Please send us your events for inclusion.
ICRA@40: 23–26 September 2024, ROTTERDAM, NETHERLANDS
IROS 2024: 14–18 October 2024, ABU DHABI, UNITED ARAB EMIRATES
We introduce Berkeley Humanoid, a reliable and low-cost mid-scale humanoid research platform for learning-based control. Our lightweight, in-house-built robot is designed specifically for learning algorithms with low simulation complexity, anthropomorphic motion, and high reliability against falls. Capable of omnidirectional locomotion and withstanding large perturbations with a compact setup, our system aims for scalable, sim-to-real deployment of learning-based humanoid systems.
This article presents Ray, a new type of audio-animatronic robot head. All the mechanical structure of the robot is built in one step by 3-D printing... This simple, lightweight structure and the separate tendon-based actuation system underneath allow for smooth, fast motions of the robot. We also develop an audio-driven motion generation module that automatically synthesizes natural and rhythmic motions of the head and mouth based on the given audio.
CSAIL researchers introduce a novel approach allowing robots to be trained in simulations of scanned home environments, paving the way for customized household automation accessible to anyone.
NVIDIA CEO Jensen Huang presented a major breakthrough on Project GR00T with WIRED’s Lauren Goode at SIGGRAPH 2024. In a two-minute demonstration video, NVIDIA explained a systematic approach they discovered to scale up robot data, addressing one of the most challenging issues in robotics.
In this research, we investigated the innovative use of a manipulator as a tail in quadruped robots to augment their physical capabilities. Previous studies have primarily focused on enhancing various abilities by attaching robotic tails that function solely as tails on quadruped robots. While these tails improve the performance of the robots, they come with several disadvantages, such as increased overall weight and higher costs. To mitigate these limitations, we propose the use of a 6-DoF manipulator as a tail, allowing it to serve both as a tail and as a manipulator.
In this end-to-end demo, we showcase how MenteeBot transforms the shopping experience for individuals, particularly those using wheelchairs. Through discussions with a global retailer, MenteeBot has been designed to act as the ultimate shopping companion, offering a seamless, natural experience.
Nature Fresh Farms, based in Leamington, Ontario, is one of North America’s largest greenhouse farms growing high-quality organics, berries, peppers, tomatoes, and cucumbers. In 2022, Nature Fresh partnered with Four Growers, a FANUC Authorized System Integrator, to develop a robotic system equipped with AI to harvest tomatoes in the greenhouse environment.
Honeybee Robotics, a Blue Origin company, is developing Lunar Utility Navigation with Advanced Remote Sensing and Autonomous Beaming for Energy Redistribution, also known as LUNARSABER. In July 2024, Honeybee Robotics captured LUNARSABER’s capabilities during a demonstration of a scaled prototype.
In this video we present results of our lab from the latest field deployments conducted in the scope of the Digiforest EU project, in Stein am Rhein, Switzerland. Digiforest brings together various partners working on aerial and legged robots, autonomous harvesters, and forestry decision-makers. The goal of the project is to enable autonomous robot navigation, exploration, and mapping, both below and above the canopy, to create a data pipeline that can support and enhance foresters’ decision-making systems.
Ten years. Two countries. Multiple redesigns. Some US $80 million invested. And, finally, Zero Zero Robotics has a product it says is ready for consumers, not just robotics hobbyists—the HoverAir X1. The company has sold several hundred thousand flying cameras since the HoverAir X1 started shipping last year. It hasn’t gotten the millions of units into consumer hands—or flying above them—that its founders would like to see, but it’s a start.
“It’s been like a 10-year-long Ph.D. project,” says Zero Zero founder and CEO Meng Qiu Wang. “The thesis topic hasn’t changed. In 2014 I looked at my cell phone and thought that if I could throw away the parts I don’t need—like the screen—and add some sensors, I could build a tiny robot.”
I first spoke to Wang in early 2016, when Zero Zero came out of stealth with its version of a flying camera—at $600. Wang had been working on the project for two years. He started the project in Silicon Valley, where he and cofounder Tony Zhang were finishing up Ph.D.s in computer science at Stanford University. Then the two decamped for China, where development costs are far less.
Flying cameras were a hot topic at the time; startup Lily Robotics demonstrated a $500 flying camera in mid-2015 (and was later charged with fraud for faking its demo video), and in March of 2016 drone-maker DJI introduced a drone with autonomous flying and tracking capabilities that turned it into much the same type of flying camera that Wang envisioned, albeit at the high price of $1400.
Wang aimed to make his flying camera cheaper and easier to use than these competitors by relying on image processing for navigation—no altimeter, no GPS. In this approach, which has changed little since the first design, one camera looks at the ground and algorithms follow the camera’s motion to navigate. Another camera looks out ahead, using facial and body recognition to track a single subject.
The current version, at $349, does what Wang had envisioned, which is, he told me, “to turn the camera into a cameraman.” But, he points out, the hardware and software, and particularly the user interface, changed a lot. The size and weight have been cut in half; it’s just 125 grams. This version uses a different and more powerful chipset, and the controls are on board; while you can select modes from a smart phone app, you don’t have to.
I can verify that it is cute (about the size of a paperback book), lightweight, and extremely easy to use. I’ve never flown a standard drone without help or crashing but had no problem sending the HoverAir up to follow me down the street and then land on my hand.
It isn’t perfect. It can’t fly over water—the movement of the water confuses the algorithms that judge speed through video images of the ground. And it only tracks people; though many would like it to track their pets, Wang says animals behave erratically, diving into bushes or other places the camera can’t follow. Since the autonomous navigation algorithms rely on the person being filmed to avoid objects and simply follows that path, such dives tend to cause the drone to crash.
Since we last spoke eight years ago, Wang has been through the highs and lows of the startup rollercoaster, turning to contract engineering for a while to keep his company alive. He’s become philosophical about much of the experience.
Here’s what he had to say.
We last spoke in 2016. Tell me how you’ve changed.
Meng Qiu Wang: When I got out of Stanford in 2014 and started the company with Tony [Zhang], I was eager and hungry and hasty and I thought I was ready. But retrospectively, I wasn’t ready to start a company. I was chasing fame and money, and excitement.
Now I’m 42, I have a daughter—everything seems more meaningful now. I’m not a Buddhist, but I have a lot of Zen in my philosophy now.
I was trying so hard to flip the page to see the next chapter of my life, but now I realize, there is no next chapter, flipping the page itself is life.
You were moving really fast in 2016 and 2017. What happened during that time?
Wang: After coming out of stealth, we ramped up from 60 to 140 people planning to take this product into mass production. We got a crazy amount of media attention—covered by 2,200 media outlets. We went to CES, and it seemed like we collected every trophy there was there.
And then Apple came to us, inviting us to retail at all the Apple stores. This was a big deal; I think we were the first third party robotic product to do live demos in Apple stores. We produced about 50,000 units, bringing in about $15 million in revenue in six months.
Then a giant company made us a generous offer and we took it. But it didn’t work out. It was a certainly lesson learned for us. I can’t say more about that, but at this point if I walk down the street and I see a box of pizza, I would not try to open it; there really is no free lunch.
This early version of the Hover flying camera generated a lot of initial excitement, but never fully took off.Zero Zero Robotics
How did you survive after that deal fell apart?
Wang: We went from 150 to about 50 people and turned to contract engineering. We worked with toy drone companies, with some industrial product companies. We built computer vision systems for larger drones. We did almost four years of contract work.
But you kept working on flying cameras and launched a Kickstarter campaign in 2018. What happened to that product?
Wang: It didn’t go well. The technology wasn’t really there. We filled some orders and refunded ones that we couldn’t fill because we couldn’t get the remote controller to work.
We really didn’t have enough resources to create a new product for a new product category, a flying camera, to educate the market.
So we decided to build a more conventional drone—our V-Coptr, a V-shaped bi-copter with only two propellers—to compete against DJI. We didn’t know how hard it would be. We worked on it for four years. Key engineers left out of total dismay, they lost faith, they lost hope.
We came so close to going bankrupt so many times—at least six times in 10 years I thought I wasn’t going to be able to make payroll for the next month, but each time I got super lucky with something random happening. I never missed paying one dime—not because of my abilities, just because of luck.
We still have a relatively healthy chunk of the team, though. And this summer my first ever software engineer is coming back. The people are the biggest wealth that we’ve collected over the years. The people who are still with us are not here for money or for success. We just realized along the way that we enjoy working with each other on impossible problems.
When we talked in 2016, you envisioned the flying camera as the first in a long line of personal robotics products. Is that still your goal?
Wang: In terms of short-term strategy, we are focusing 100 percent on the flying camera. I think about other things, but I’m not going to say I have an AI hardware company, though we do use AI. After 10 years I’ve given up on talking about that.
Do you still think there’s a big market for a flying camera?
Wang: I think flying cameras have the potential to become the second home robot [the first being the robotic vacuum] that can enter tens of millions of homes.



 Khalifa University will be hosting IROS 2024 to highlight the Middle East and North Africa (MENA) region’s rapidly advancing capabilities in the robotics and intelligent transport systems.Khalifa University
Khalifa University will be hosting IROS 2024 to highlight the Middle East and North Africa (MENA) region’s rapidly advancing capabilities in the robotics and intelligent transport systems.Khalifa University Khalifa University’s Center for Robotics and Autonomous Systems (KU-CARS) includes a vibrant multidisciplinary environment for conducting robotics and autonomous vehicle-related research and innovation.Khalifa University
Khalifa University’s Center for Robotics and Autonomous Systems (KU-CARS) includes a vibrant multidisciplinary environment for conducting robotics and autonomous vehicle-related research and innovation.Khalifa University



 Chung is a fun-loving 5th-grade teacher, former robotics coach, and content creator from Orange County, California, in her 26th year of teaching. She is passionate about sharing her ideas on creative projects, designing intentional learning spaces, teaching highly engaging lessons, building meaningful relationships, and cultivating a community that sparks discovery and inclusion.
Chung is a fun-loving 5th-grade teacher, former robotics coach, and content creator from Orange County, California, in her 26th year of teaching. She is passionate about sharing her ideas on creative projects, designing intentional learning spaces, teaching highly engaging lessons, building meaningful relationships, and cultivating a community that sparks discovery and inclusion.





 Alex’s actuators are all designed in-house, and the next version will feature new grippers that allow for quicker tool changes.Boardwalk Robotics
Alex’s actuators are all designed in-house, and the next version will feature new grippers that allow for quicker tool changes.Boardwalk Robotics
 Alex is available for researchers to purchase immediately.Boardwalk Robotics
Alex is available for researchers to purchase immediately.Boardwalk Robotics






 Slick, but also a little sinister?Figure
Slick, but also a little sinister?Figure

 The iRobot Roomba was carefully designed to meld looks with function.iStock
The iRobot Roomba was carefully designed to meld looks with function.iStock An iRobot PackBot picks up a demonstration object at the Joint Robotics Repair Detachment at Victory Base Complex in Baghdad.Alamy
An iRobot PackBot picks up a demonstration object at the Joint Robotics Repair Detachment at Victory Base Complex in Baghdad.Alamy



 This early version of the Hover flying camera generated a lot of initial excitement, but never fully took off.Zero Zero Robotics
This early version of the Hover flying camera generated a lot of initial excitement, but never fully took off.Zero Zero Robotics
{kind=link}